- Joined
- May 11, 2015
- Messages
- 1,324
- Reaction score
- 577
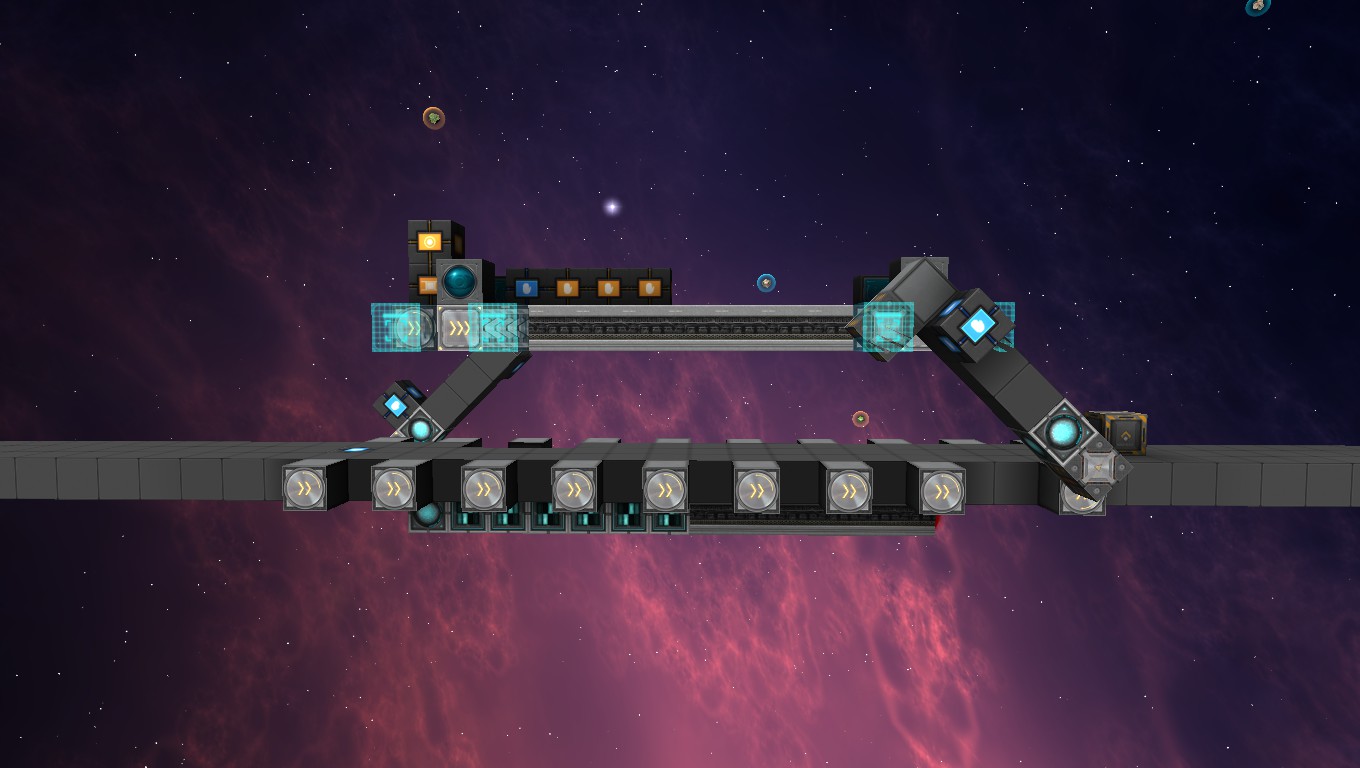
In a quest to build something awesome. I was stuck with a monster that would twitch around.

I wanted to build a walker that actually walked a long a surface. I even worked out a scheme that would allow it to do it with the new pickup modules, and minimal logic.
The problem was that due to the way the rails snapped it would jerk around and looked awful. I'm hoping its pretty easy to implement but when something docks, and the rail is set to an angle it would attempt to dock to the closest of the set angle that it could instead of snapping all the way around.
The other way would be having a rotator that just rotated it to the point it was aiming instead of starting at that point. This version would make mecha pretty awesome as you would just be setting a destination instead. Particularly useful if it worked on 45s. Basically a servo vs a rotator block.
It would allow my docking/undocking legs to move fluidly instead of snapping all over the place.
If this breaks existing mechanics maybe adding this to some sort of free axis rail might work.
I wanted to build a walker that actually walked a long a surface. I even worked out a scheme that would allow it to do it with the new pickup modules, and minimal logic.
The problem was that due to the way the rails snapped it would jerk around and looked awful. I'm hoping its pretty easy to implement but when something docks, and the rail is set to an angle it would attempt to dock to the closest of the set angle that it could instead of snapping all the way around.
The other way would be having a rotator that just rotated it to the point it was aiming instead of starting at that point. This version would make mecha pretty awesome as you would just be setting a destination instead. Particularly useful if it worked on 45s. Basically a servo vs a rotator block.
It would allow my docking/undocking legs to move fluidly instead of snapping all over the place.
If this breaks existing mechanics maybe adding this to some sort of free axis rail might work.